Dinamica
La dinamica è quella parte della meccanica che studia la relazione tra le forze e movimenti. E' costruita su tre principi fondamentali.
I° principio (principio di inerzia)
Un corpo tende a mantenere il suo stato di quiete o di moto rettilineo
uniforme, se non interviene una forza esterna a cambiare tale stato.
II° principio (principio di proporzionalità)
Se ad un corpo si applica una forza continua costante, esso si muove di
moto uniformemente accelerato, in direzione della forza. Il rapporto tra
la forza applicata e l'accelerazione ottenuta è costante ed è pari alla
massa del corpo.
![]()
III° principio (principio di azione e reazione)
Ad ogni azione corrisponde sempre una reazione uguale contraria.
Principio di D'Alembert
Per i principi della dinamica le forze agenti su un corpo vengono classificate
in: Forze esterne che applicate al corpo che ne fanno variare il moto
(F). Forze esterne e forze d'inerzia che contrastano le variazioni del
moto
(m· a)
![]()

La forza esterna F si oppone al prodotto - m·a che viene chiamato forza d'inerzia. Questo può essere ritenuto valido per un corpo che si muove nello spazio in condizioni ideali ed in assenza di attriti. Nella realtà fra le forze esterne si devono considerare, che oltre alle forze attive, anche le forze resistenti (reazioni vincolari, attriti, etc..). Quindi alla forza attiva F si deve sottrarre anche l'eventuale risultante delle forze passive che possiamo chiamare R. Il principio di Alembert afferma che : Durante il moto (accelerato) di un corpo si fanno equilibrio in ogni momento, le forze esterne, attive e resistenti e le forze di inerzia agenti sul corpo.
1) se il moto è uniforme su un piano orizzontale,
essendo la velocità costante a=0 e quindi ma=0
 |
|
2) se il moto è accelerato la forza motrice deve equilibrare la forza di inerzia e la forza resistente:
 |
|
3) se il moto è decelerato (manca la forza motrice) l'accelerazione
è negativa per cui il vettore ma ha verso contrario rispetto al caso precedente:
la forza di inerzia favorisce il moto mentre la forza resistente lo contrasta.
 |
|
4) se il moto è uniforme verso l'alto su un piano inclinato;
la forza d'inerzia (ma) è nulla ma si deve considerare la componente PT
della forza peso che si oppone alla salita.
 |
|
5) se il moto è accelerato verso l'alto su un piano inclinato; la forza d'inerzia non è nulla.
 |
|
6) se il moto è in discesa su un piano inclinato; con moto accelerato, sotto l'effetto della componente PT della forza-peso si ha:
 |
|
Impulso di forza e quantità di moto
Consideriando ancora l'equazione fondamentale della dinamica
![]()
Moltiplichiamo entrambi i membri per il tempo
![]()
Ma il fattore a ·t=v nel moto uniformemente accelerato è
la velocità finale raggiunta da un corpo dotato dell'accelerazione a dopo
un tempo t. Avremo dunque :
![]()
Il prodotto F·t è detto impulso
di forza. La quantità di moto è una grandezza vettoriale
ed ha la stessa direzione della velocità . Il prodotto mv è detto
quantità di moto.
La prima legge si può esprimere anche come: una particella libera
si muove sempre con quantità di moto costante.
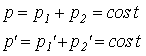
Principio di conservazione
della quantità di moto: La quantità di moto totale di un sistema composto
da due particelle soggette soltanto alla loro mutua interazione rimane
costante.
Come indicato in figura
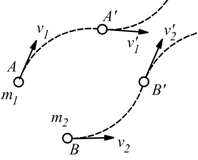
all'istante t la particella 1 si trova in A con velocità
V1 e la particella 2 si trova in B con velocità V2.
In un istante successivo t' le particelle si trovano in A' e B' con velocitàV1'
e V2'. Se indichiamo con m1 ed m2 le
rispettive masse delle due particelle:
![]()
Nell'istante successivo t' avremo:
![]()
Per il principio di conservazione della quantità di moto avremo:
![]()
Un'interazione fra due particelle produce uno scambio di quantità di moto,
cosicché la quantità di moto persa da una delle due particelle è uguale
alla quantità di moto guadagnata dall'altra particella.
Sottraendo membro a membro

Cioè
![]() quindi:
quindi:
![]() differenziando
rispetto al tempo t:
differenziando
rispetto al tempo t:
![]()
La forza è la derivata rispetto al tempo della quantità di moto. (secondo
principio della dinamica).
L'equazione precedente diventa:
![]()
Quando due particelle interagiscono , la forza agente su una particella
è uguale ed opposta alla forza agente sull'altra (che poi coincide col
terzo principio della dinamica).
Sapendo che la massa m è costante
![]() cioè:
cioè:

Forze di attrito
Ogni volta che due corpi sono in contatto, come nel caso di un oggetto posto su un tavolo, si manifesta una resistenza che si oppone al moto relativo dei due corpi. Supponiamo per esempio di spingere un oggetto lungo il tavolo, imprimendogli una certa velocità. Dopo che la spinta è cessata, l'oggetto rallenta e alla fine si ferma.

Questa perdita di quantità di moto è indicativa di una forza che si oppone al moto; la forza è chiamata attrito radente. Si può sperimentare e dimostrare che la forza associata all'attrito radente che si oppone al moto dell'oggetto vale:
![]()
N è la forza normale che preme un corpo contro
l'altro, f è una costante di proporzionalità detta :
coefficiente di attrito.
|
Superfici a contatto |
Secche |
lubrificate |
|
Acciaio su acciaio |
0,2 |
0,1 |
|
Ghisa su ghisa |
0,12 |
0,07 |
|
Bronzo su ghisa |
0,15 |
0,08 |
|
Cuoio su ghisa |
0,6 |
0 |
|
Caucciù su metallo o legno |
0,5 |
0 |
|
Metallo su legno |
0,5 |
0,2 |
|
Legno su legno |
0,4 |
0,15 |
Le considerazioni valgono anche se il piano di attrito è inclinato

Si riconosce che:
![]() dividendo
membro a membro:
dividendo
membro a membro: ![]()
Si può anche notare che : ![]() la
forza di attrito vale in questo caso:
la
forza di attrito vale in questo caso:
![]() se
F>R il grave comincia a scivolare in discesa;
se
F>R il grave comincia a scivolare in discesa;
il grave resta fermo finché
![]()
tornando ai casi precedenti del moto di un corpo su un piano inclinato,
viene definito rendimento di un piano inclinato il rapporto:
 |
con |
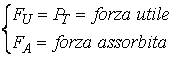 |
 |
Quindi il rendimento del piano è |

Attrito volvente
Questo è un tipo di attrito che si ha quando un corpo cilindrico ruota su un piano

Considerata la semilunghezza b di una lunghezza simmetrica 2b rappresentativa
la lunghezza della superficie di contatto, l'equazione di equilibrio alla
rotazione è:
![]() il
coefficiente
il
coefficiente ![]() è
il coefficiente di attrito volvente
è
il coefficiente di attrito volvente
In condizioni di moto uniforme F=R, per cui:
![]()
L'attrito volvente è proporzionale alla pressione normale e dipende
dalla natura delle superfici a contatto. Valori tipici dell'attrito volvente
sono:
fv=0,015÷0,035 autoveicoli su strada
fv=0,002÷0,003 veicoli su rotaia
Moto curvilineo
Se la forza ha la stessa direzione della velocità, il moto è rettilineo
. Per produrre moto curvilineo la forza risultante deve formare un angolo
diverso da zero con la velocità, in modo che l'accelerazione abbia una
componente perpendicolare alla velocità che renda conto del cambiamento
di direzione del moto.
Se la massa è costante, la forza deve essere parallela all'accelerazione
(2°principio) infatti forza e accelerazione sono grandezze vettoriali
e nella ![]() esse
devono essere cospiranti.
esse
devono essere cospiranti.
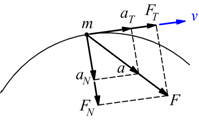 |
Secondo lo schema illustrato deve essere: |

Dove ρ è il raggio di curvatura dato che 
La forza tangenziale è responsabile della variazione in modulo (in intensità)
della velocità mentre la forza centripeta è responsabile della variazione
in direzione della velocità. Se la forza tangenziale è nulla non si ha
accelerazione tangenziale e il moto è circolare uniforme. Se la forza
normale (centripeta) è nulla si ha moto rettilineo. Nel caso particolare
di moto circolare ρ=R
 essendo
essendo
![]() avremo:
avremo: ![]()
Per il moto uniforme, l'unica accelerazione è aN che si può
anche scrivere nella forma ![]()
(prodotto scalare) pertanto :
![]()
Forza centrifuga
Caratterizza un corpo che percorre una traiettoria curva, agisce continuamente
su di esso con una spinta rivolta verso l'esterno della curva. Questa
spinta tende ad allontanare il corpo dal centro di rotazione e viene chiamata
appunto forza centrifuga.
Dal secondo principio della dinamica abbiamo: F=m·a Nel caso della
forza centrifuga avremo l'accelerazione centrifuga: Fc=m·ac
.
Ricordandoci che l'accelerazione centripeta è  dove
r è il raggio della curvatura
dove
r è il raggio della curvatura

Fc=forza centrifuga ( e centripeta ) [N]
m=massa del corpo [kg]
v= velocità periferica [m/sec]
r= raggio di rotazione [m]
Volendo esprimere la forza Fc in funzione della velocità angolare
