
Motori brushless
I motori brushless sono i motori in continua senza spazzole. La loro costituzione prevede che il campo magnetico sia generato sul rotore mentre sullo statore viene fissata l'armatura.
L'accoppiamento collettore-spazzole viene sostituito da un commutatore elettronico che inverte la polarità della alimentazione per ogni mezzo giro (180°) effettuato dal rotore; l'eliminazione di questo sistema rende questo tipo di motore meno rumoroso e di più semplice manutenzione rispetto a quello ad eccitazione indipendente.
La posizione del rotore rispetto allo statore viene rilevata da un sensore magnetico che comanda la tensione di alimentazione degli avvolgimenti dello statore in funzione della posizione del campo generato dal rotore.
La tensione erogata dal sensore è massima quando le linee di flusso del campo sono perpendicolari alla superficie del sensore; in tale circostanza, la polarità della tensione si inverte, invertendo il campo. Come nel caso del motore ad eccitazione indipendente si ha una inversione di corrente negli avvolgimenti di armatura ad ogni 180° di rotazione del rotore.
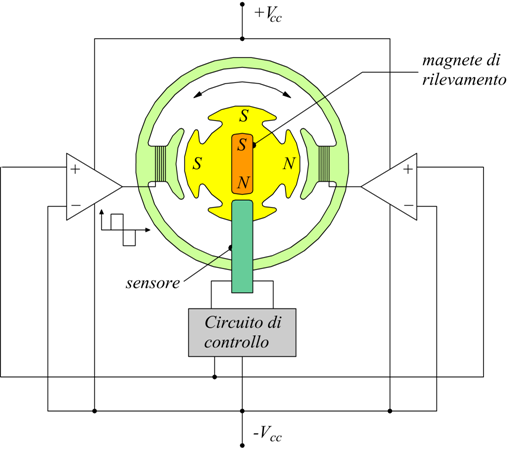
In figura è riportato uno schema bipolare dove vi è un unico avvolgimento
statorico (unipolare) che assume due polarità magnetiche opposte a secondo
del verso di percorrenza della corrente erogata dai due amplificatori
di potenza (norton) che eseguono la commutazione (fra le loro due tensioni
di saturazione inferiore e superiore) comandati dal circuito di controllo,
collegato al sensore.
Uno schema bipolare, non garantisce una coppia uniforme e viene realizzata solo per piccoli motori a coppia costante, come le ventole dei computer o i motori-driver dei dischi.
Motori passo-passo
I motori posso-passo (o step) hanno gli avvolgimenti di eccitazione sulla cassa statorica e vengono comandati in modalità on/off da onde quadre (come nel caso del motore brushless).
Ad ogni livello alto dell'onda corrisponde uno spostamento angolare del rotore (passo angolare) che esegue, dunque, posizionamenti e spostamenti molto precisi. Come nel caso del motore brushless è assente il contatto spazzola-collettore che ne aumenta la robustezza e ne diminuisce la necessità di manutenzione.
Vanno prevenute certe eventualità: se la coppia resistente è maggiore della coppia motrice, si ha una perdita di passo; Di conseguenza l'uso di questi motori è limitato all'utilizzo su bassi carichi come le parti in movimento di stampanti o telecamere.

Il rotore bipolare è costituito da un magnete permanente. Lo statore ha 4 poli e su ciascun polo è avvolta una bobina. Ogni coppia di bobine posta sullo stesso diametro viene alimentata simultaneamente e costituisce una fase con polarità N-S o S-N a secondo del verso di percorrenza della corrente. Questo tipo di motore è detto a 2 fasi (AB+CD).
Esistono tre modi per comandare un motore step:
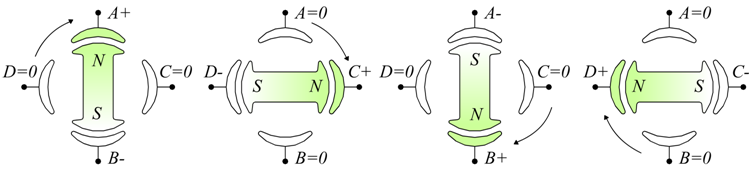
Nel modo wave drive il rotore a magneti permanenti compie 90° ad ogni passo e si allinea con le espansioni polari statoriche.
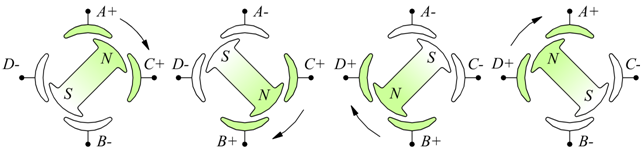
Nel modo normal drive il rotore un
passo di 90° allineandosi con la bisettrice della coppia di espansioni
polari statoriche che vengono alimentate.
Nel modo half step il rotore compie un passo di 45°.

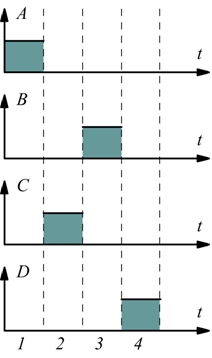
Nella figura seguente è indicato lo schema ad interruttori per comandare la fase AB.

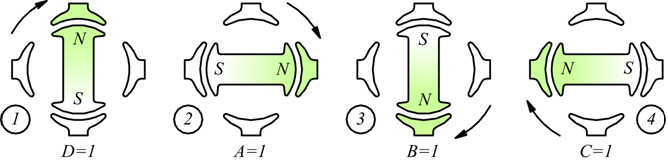
Nella figura a fianco è indicata la sequenza di comando
per un motore wave drive.
Sotto, è invece riportato lo schema concettuale di un motore
passo-passo unipolare.

Lo statore è dotato di due avvolgimenti, ciascuno con una presa centrale e due collegamenti con relativi interruttori agli estremi.
La presa centrale degli avvolgimenti è sempre collegata all'alimentazione; se si porta a massa uno degli estremi lasciando l'altro aperto, la corrente circola in una metà dell'avvolgimento e determina la magnetizzazione in un verso del circuito magnetico.
Se invece viene posto a massa l'altro estremo, la corrente circola nella seconda metà della bobina e il circuito magnetico è polarizzato in senso inverso rispetto al caso precedente. I deviatori porteranno a massa gli estremi delle bobine secondo la sequenza qui indicata (D=1 → D a massa).
L'angolo di rotazione di un motore passo-passo è dato dalla:

α=angolo corrispondente ad 1 passo in gradi.
n=numero di poli statorici (4 nei casi visti) .
p=numero di coppie polari rotoriche.
i=n·p=numero di passi per giro.
In prevalenza, i motori visti hanno un passo di angolo 90°; per diminuirlo occorre aumentare n o p.
La riduzione dell'angolo implica l'aumento del numero di impulsi necessari per far compiere un giro completo rispetto ai 4 impulsi necessari per un angolo di 90°.